مؤتمرات جمعية المهندسين العراقية مؤتمرات جمعية المهندسين العراقية
مؤتمرات جمعية المهندسين العراقية مؤتمرات جمعية المهندسين العراقية
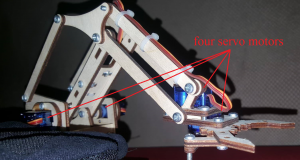
The aim of this project is implementing a control method that making the user control Arm Robot through reading the motion of human hand and fingers by using two bending sensors and gyroscope. both of them attached to the glove that are used for hand motion recognition and finger bending detection. Sensors play an important role in robotics system. in ...
أكمل القراءة »Controlling Articulated Robot using Flex Sensor and Gyroscope